


據(jù)外媒報道,據(jù)賓夕法尼亞州立大學助理教授Long He介紹稱,蘑菇養(yǎng)殖業(yè)目前正面臨著勞動力短缺的問題。因此,他的團隊開始著手解決這個問題--開發(fā)了一個蘑菇采摘機器人。這款電動氣動裝置專為架子上生長的雙孢蘑菇(Agaricus bisporus)設計,它能夠采摘蘑菇、修剪蘑菇莖的末端,然后將它們放入收集盒中。
計劃要求它最終能利用機器視覺系統(tǒng)以看到并瞄準單個蘑菇。
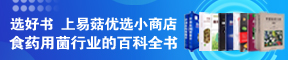
據(jù)了解,真正的采摘是通過一個可調(diào)節(jié)壓力的吸盤實現(xiàn),這個吸盤會固定在每個蘑菇的頂部,然后向上拉起。研究人員試驗了不同的空氣壓力和吸入時間以得到一個組合,這個組合能讓蘑菇被采摘、放到機器人修剪刀片上然后被放入盒子里--所有這些都不會傷到蘑菇的肉。

截止到目前,在實驗室進行的測試中,該機器人采摘蘑菇的成功率達到94.2%,修剪蘑菇莖的成功率達到97%。研究人員相信,一旦吸盤的形式為任務優(yōu)化,這些數(shù)字應該能得到改善。
He說道:“賓夕法尼亞州的蘑菇產(chǎn)業(yè)生產(chǎn)的蘑菇占全國蘑菇產(chǎn)量的2/3,這里的種植者很難找到工人來處理收獲,這是一個非常勞動密集型和困難的工作。這個行業(yè)正面臨著一些挑戰(zhàn),所以像我們正在研究的這種自動收割系統(tǒng)將會有很大幫助。”
企Fable Food融資650萬澳元 將在美國出售基于蘑菇的肉類替代品")
生指死因或與誤食毒蘑菇有關(guān)")

明嬰兒“香菇尿片”")



